When we set out to design a bee, we decided that we wanted our Bee Toy to have interesting mechanics and a duality of simplicity and complexity. We didn’t want it to look mean (like a wasp), or worse: cute. We took some time studying different bees. We researched many diagrams and drawings, but Eric was happy to stumble across this amazing specimen on a hiking trail.

The concept for our toy bee was for the wings to flap when the abdomen (stinger) is pulled by using mechanics which would invoke curiosity and expose the moving components - to help a curious kid figure out exactly how the bee works. After establishing these goals, we did loads of sketches, and dozens of prototypes. All things told; we tried out over seventeen different options. During this process, the bee changed shapes many times (and occasionally drifted into wasp territory).

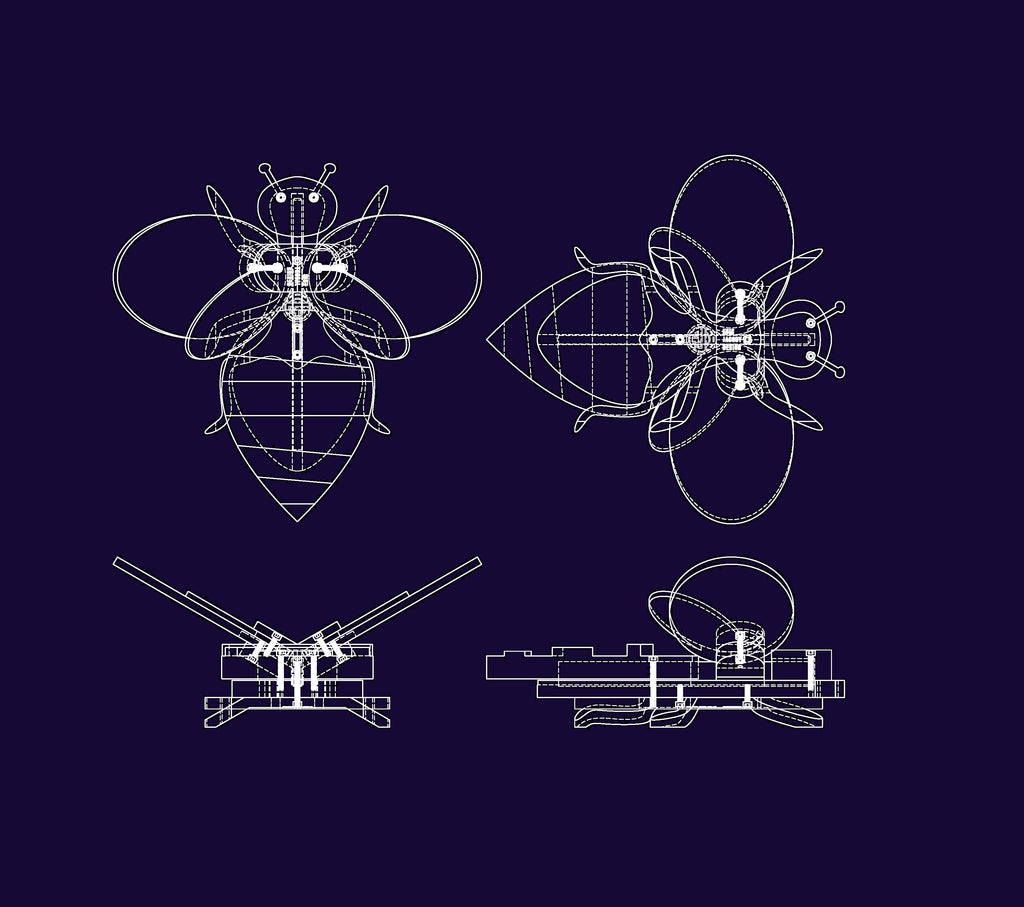
At one point, when the bee seemed like it would be perpetually flat – I noticed that my four year old daughter had drawn a bee on a piece of wood she found in my workshop. It was wonderful (and strongly tempted me to acquiesce to a cute bee solution)! I wanted to understand what I liked about her bee drawing, so I took some time studying ways to transform it into a toy. While I was de-constructing her bee, my mind wandered to Luke Skywalker and I had the sudden idea to try an x-wing configuration for the wings – ultimately it was this change in perspective that helped the bee to have a more dynamic look – and more importantly the new form provided adequate room for the individual systems to function well together.

Arriving at the x-bee-fighter concept was only half the challenge, now we needed to work out the mechanics. 3-d modeling and geometric calculations helped, but ultimately it took a lot of trial and error, as well as analogue techniques.

Eventually, we arrived at a cool solution for the flapping wing mechanism which is based on different types of force vectors and different structural connections.

The entire design process for the Tectonic Bee included many failed attempts (including avoidable things like filament running out during prints – or perplexing things like moving parts which work backwards (or are frozen)); but at each stage, we found added excitement about the progress and photographed each step of the way.
To read more about the educational, experiential, or mechanical characteristics of the Tectonic Bee (and grasshopper, and dragonfly) check out our separate blog post to read more about how the Tectonic Toy Bee fits into STEaM education.
